Mỹ phát minh loại rôbốt giống hình con gián để vượt qua mọi địa hình
Nhóm nghiên cứu thuộc Đại học California tại Berkeley (Mỹ) phát triển loại rôbốt này dựa trên hình dạng cơ thể của con gián và hy vọng rằng mẫu thiết kế của họ có thể được sử dụng để lan truyền cảm hứng cho các mẫu rôbốt tương lai phục vụ trong lĩnh vực giám sát môi trường và các hoạt động tìm kiếm, cứu nạn.
Nhóm nghiên cứu Berkeley, do Chen Li - Nghiên cứu sinh sau Tiến sĩ đứng đầu, đã thiết kế hình dạng lớp vỏ để rôbốt có thể thực hiện một chuyển động cuộn trượt qua khoảng trống giữa các chướng ngại vật thẳng đứng giống như cỏ mà không cần các động cơ hoặc cảm biến bổ sung.
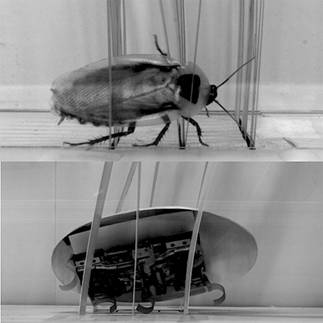
Rôbốt hình gián có thể len lỏi qua các chướng ngại vật
Kết quả thử nghiệm ban đầu về hiệu suất của loại rôbốt này cho thấy kết quả rất tốt và được đăng trên Tạp chí khoa học Bioinspiration & Biomimetics phát hành ngày 23/6/2015. Loại rôbốt mặt đất này khác với những rôbốt trước đây là không né tránh chướng ngại vật mà đi xuyên qua chúng.
Chen Li cho biết “Đa số các nghiên cứu khoa học rôbốt đã giải quyết vấn đề liên quan trở ngại vật bằng cách né tránh chúng, điều này phần lớn phụ thuộc vào việc sử dụng thiết bị cảm biến để vạch ra các môi trường và thuật toán giúp xác lập kế hoạch đường đi xung quanh những chướng ngại vật”.“Tuy nhiên, khi địa hình trở nên lộn xộn, dày đặc, khoảng cách giữa các vật cản tương đương hoặc thậm chí nhỏ hơn so với kích thước rôbốt, thì cách tiếp cận này bắt đầu gặp rắc rối do không thể vạch ra một tuyến đường đi rõ ràng”.
Vì vậy, trong quá trình nghiên cứu, các nhà khoa học đã sử dụng máy quay tốc độ cao để nghiên cứu sự chuyển động của loài gián hình dạng đĩa có tên gọi Blaberus Discoidalis đi xuyên qua một dãy chướng ngại vật nhân tạo bao gồm các thanh mỏng thẳng đứng giống như cỏ với khoảng không gian chật hẹp.
Sau khi nghiên cứu về loài gián này, các nhà nghiên cứu đã thử nghiệm loại rôbốt nhỏ, hình chữ nhật, có sáu chân và quan sát liệu nó có thể đi qua một dãy các trở ngại vật tương tự nhau. Tuy nhiên, với một cơ thể hình chữ nhật, rôbốt thường không thể đi qua các chùm ngại vật giống như cỏ và thường va chạm với các chướng trở ngại, thường xuyên bị mắc kẹt. Ngược lại, rôbốt được trang bị lớp vỏ bầu tròn được làm trơn tru, thì nó có khả năng cao hơn nhiều để di chuyển thành công xuyên qua các dãy trở ngại vật nhờ sử dụng một chuyển động cuộn qua lại tương tự như những con gián. Hành vi thích nghi này đã diễn ra mà không có gì thay đổi đối với cả lập trình rôbốt, chứng tỏ rằng hành vi thông minh đó bắt nguồn từ chính lớp vỏ.
Theo Chen Li, “Bên cạnh hình dạng mỏng và tròn, có thể còn có hình dạng khác phù hợp cho các mục đích khác, chẳng hạn như leo lên cao và vượt những loại trở ngại khác.
Các bước tiếp theo của chúng tôi sẽ là nghiên cứu sự đa dạng về địa hình và hình dạng động vật để khám phá thêm các hình dạng có thể chuyển động len lỏi trong môi trường rắn như đất và thậm chí là các hình dạng có thể biến đổi. Những khái niệm mới này sẽ cho phép rôbốt trên mặt đất đi qua được nhiều loại môi trường lộn xộn với thiết bị cảm biến rất nhỏ và bộ điều khiển đơn giản”.
Hải Yến - Skcs.vn
Các tin khác
-

Malaysia nghiên cứu phát triển vaccine Covid-19 dạng xịt mũi hoặc uống
Rất nhiều người không được tiêm vaccine ngừa Covid-19 do sợ kim tiêm do đó các nhà nghiên cứu tại Malaysia đã nghiên cứu phát triển vaccine Covid-19 dạng uống hoặc xịt mũi -

Phát triển thiết bị phân tích chất lượng nước sinh hoạt bằng giấy
Các nhà nghiên cứu thuộc Trường đại học Công giáo Louvain (UCLouvain) đã nghiên cứu, phát triển một thiết bị phân tích được chất lượng nước bằng giấy. -
Phát triển vật liệu in 3D có khả năng tiêu diệt virus SARS-CoV-2
Loại vật liệu in 3D đầu tiên trên thế giới được nghiên cứu và phát triển có khả năng tiêu diệt virus SARS-CoV-2 gây bệnh Covid-19 trên bề mặt trong vòng 20 phút, giảm nguy cơ lây nhiễm trong cộng đồng. -
Chế tạo robot lỏng hoạt động liên tục không cần pin, nguồn điện
Nhóm các nhà nghiên cứu Khoa Năng lượng thuộc Phòng thí nghiệm Quốc gia Lawrence Berkeley (LBNL) và Đại học Massachusetts Amherst đã chế tạo một loại robot lỏng hoạt động liên tục không cần điện. -

Phát triển loại thép không gỉ có thể tiêu diệt virus SARS-CoV-2
Các nhà nghiên cứu tại Hồng Kông đã nghiên cứu phát triển một loại thép không gỉ có khả năng tiêu tiệt SARS-CoV-2 trong vài giờ giúp hạn chế sự lây lan virus ở các khu vực công cộng, thang máy, tay nắm cửa,… -

Nhật Bản phát minh loại khẩu trang phát hiện được Covid-19
Nhóm các nhà khoa học đến từ Đại học tỉnh Kyoto (KPU), nằm ở phía tây Nhật Bản đã nghiên cứu phát minh ra một loại khẩu trang không những ngăn ngừa lây nhiễm Covid-19 mà còn có khả năng phát hiện nếu tiếp xúc với SARS-CoV-2 -

Sáng chế loại kẹo cao su giúp giảm lây nhiễm Covid-19
Mới đây, các nhà khoa học Mỹ đã sáng chế một loại kẹo cao su mới có khả năng giúp bẫy virus SARS-CoV-2, từ đó giảm các ca lây nhiễm Covid-19. -

Mũ cách ly di động phòng chống dịch Covid-19 lợi hại như thế nào?
"Mũ cách ly" di động Vihelm của 3 bạn trẻ Việt Nam được Tổ chức Sở hữu trí tuệ Thế giới vinh danh, trao danh hiệu Đại sứ trẻ Sở hữu trí tuệ. Vậy sáng chế “chiếc mũ cách ly di động” này có điểm gì đặc biệt trong việc phòng chống dịch Covid-19 hiện nay? -

Trung Quốc phát triển robot tí hon chở thuốc đến tiêu diệt tế bào ung thư
Nghiên cứu mới đăng trên tạp chí ACS Nano cho biết, các nhà khoa học Trung Quốc phát triển robot động vật in 3D có thể di chuyển trong mạch máu, mang theo hạt nano thuốc và tự động phun ra khi đến đích. -

Nghiên cứu phát triển biến bã cà phê thành vật liệu dùng trong pin Lithium-ion
Bã cà phê không chỉ sử dụng để chăm sóc da, làm đẹp, khử mùi ẩm mốc, phân bón,…mà các nhà nghiên cứu tại Indonesia đã phát triển phương pháp biến bã cà phê thành vật liệu dùng trong pin Lithium-ion.