Chế tạo bọ robot đàn hồi giúp tìm kiếm, cứu hộ cứu nạn dễ dàng
Những kiểu robot truyền thống được làm bằng các vật liệu cứng, cấu trúc dễ gãy, chuyển động bị hạn chế, không hiệu quả ở những không gian hẹp, địa đình phức tạp. Để cải thiện những vấn đề này mới đây các nhà khoa học đã chế tạo một robot nhỏ có cơ thể linh hoạt, dễ dàng điều khiển, đàn hồi có thể cải thiện được những vấn đề robot truyền thống đang gặp phải.
Robot thường được chế tạo bằng những vật liệu cứng như hợp kim, nhựa, sắt, khiến cấu trúc của chúng chuyển động bị hạn chế ở không gian hẹp, dễ gãy, một số địa hình gồ gề, phức tạp khiến chúng khó di chuyển.
Nhằm giải quyết vấn đề này ở robot hiện nay đang gặp phải, nhóm các nhà nghiên cứu tại Đại học tư nhân Dartmouth, Mỹ đồng sáng tạo và phát triển một con bọ robot nhỏ có cơ thể linh hoạt, dễ dàng điều khiển, di chuyển được trên mọi loại địa hình khác nhau và lách qua các không gian hẹp mà không làm hỏng hay hư hại các chức năng kỹ thuật của robot giúp cho quá trình tìm kiếm, cứu nạn cứu hộ được dễ dàng hiệu quả hơn.
Robot đàn hồi mới này sở hữu tính năng kỹ thuật độc này là sự kết hợp giữa thiết kế sáng tạo và chế tạo đầu dò bằng vật liệu tiên tiến. Robot được chế tạo bằng các màng polyimide mỏng, dễ dàng được kích hoạt bằng lực tĩnh điện có mặt khắp nơi.
Thiết bị truyền động lực tĩnh điện, hình thành cơ thể robot, có cấu trúc kiểu bánh sandwich ba lớp với lớp trên cùng được uốn cong lên tạo thành hình vòng cung.
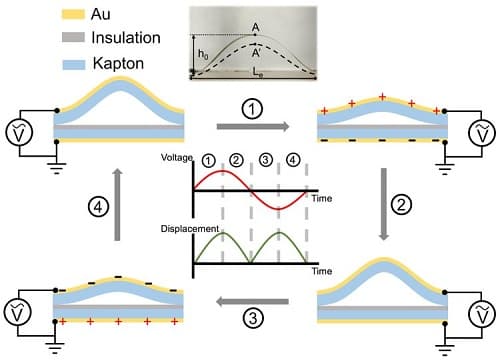
Nguyên lý thiết bị truyền động lực tính điện của bọ robot
Khi cấp một điện áp xoay chiều cho lớp màng trên và dưới, màng trên bị vênh sẽ biến dạng định kỳ, chuyển đổi điện thế tĩnh điện thành động năng và năng lượng đàn hồi.
Tốc độ của robot được điều chỉnh bằng biên độ hoặc tần số hay cả hai thông số điện áp xoay chiều đầu vào hoặc bằng cách kết nối điện thế với hai bộ phận điều khiển độc lập như chân, robot có thể dễ dàng được kiểm soát và điều khiển cơ động di chuyển qua nhiều môi trường hoặc địa hình phức tạp khác nhau.
Congran (Billy) Jin, nghiên cứu sinh tiến sĩ kỹ thuật tại Đại học Dartmouth chia sẻ: Do thiết kế dựa trên lớp màng mỏng, robot có cấu trúc với trọng lượng nhẹ, khả năng truyền động lực mạnh, bọ robot có khả năng linh hoạt bò qua các không gian hẹp, nhanh chóng di chuyển qua các địa hình phức tạp khác nhau, có khả năng phục hồi sau khi bị nghiền ép.
Trợ lý giáo sư công nghệ tại Trường Kỹ thuật Thayer thuộc Đại học Dartmouth, Ông Zi Chen chia sẻ thêm: thiết kế robot dạng này cũng có khả năng điều chỉnh cho những ứng dụng chuyên biệt dễ dàng bằng các sửa đổi thiết kế theo yêu cầu nhiệm vụ
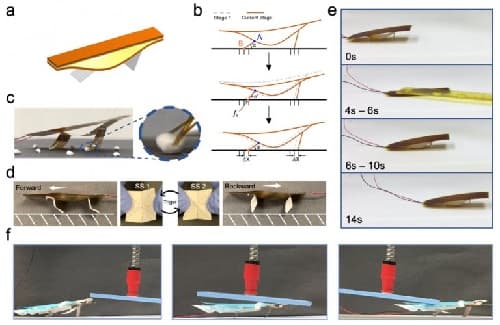
Đối với loại robot này các nhà khao học đã lắp thêm các chân, được chế tạo từ origami ổn định 2 trạng thái. Sáng tạo này cho phép bọ robot có thể di chuyển cả về phía trước hoặc phía sau khi các chân robot chuyển đổi giữa hai trạng thái ổn định cơ học. Hơn nữa, khi tạo ra kiểu cắt nhất định trên chân robots, có thể tăng đáng kể khả năng vượt qua những chướng ngại vật nhỏ.
Cách tiếp cận đơn giản nhưng sáng tạo này của các nhà chế tạo đã tạo thành một robot linh hoạt, có khả năng cơ động cao, không chỉ có thể đi đến những nơi mà robot cứng truyền thống không thể, mà còn có thể chống lại được các biến dạng cơ học trong quá trình khai thác sử dụng.
Bọ robot độc đáo này có thể mở ra hàng loạt các robot nhỏ, đơn giản nhưng ứng dụng tiềm năng trong các lĩnh vực quan trọng như phát hiện, kiểm tra, tìm kiếm và cứu nạn cứu hộ trong thảm họa, động đất,…
Dự án đang được phát triển dưới sự lãnh đạo của GS Zi Chen, GS John XJ Zhang từ Trường Kỹ thuật Thayer tại Đại học Dartmouth, phối hợp với GS Kim Hoa Zhang từ Đại học Xi'an Jiaotong, Trung Quố. Hi vọng trong tương lai robot này giúp ích được nhiều cho công tác tìm kiếm, cứu nạn, di chuyển đến những nơi mà con người không thể đến được.
Suckhoecuocsong.vn/Theo Khoahocdoisong
Các tin khác
-

Malaysia nghiên cứu phát triển vaccine Covid-19 dạng xịt mũi hoặc uống
Rất nhiều người không được tiêm vaccine ngừa Covid-19 do sợ kim tiêm do đó các nhà nghiên cứu tại Malaysia đã nghiên cứu phát triển vaccine Covid-19 dạng uống hoặc xịt mũi -

Phát triển thiết bị phân tích chất lượng nước sinh hoạt bằng giấy
Các nhà nghiên cứu thuộc Trường đại học Công giáo Louvain (UCLouvain) đã nghiên cứu, phát triển một thiết bị phân tích được chất lượng nước bằng giấy. -
Phát triển vật liệu in 3D có khả năng tiêu diệt virus SARS-CoV-2
Loại vật liệu in 3D đầu tiên trên thế giới được nghiên cứu và phát triển có khả năng tiêu diệt virus SARS-CoV-2 gây bệnh Covid-19 trên bề mặt trong vòng 20 phút, giảm nguy cơ lây nhiễm trong cộng đồng. -
Chế tạo robot lỏng hoạt động liên tục không cần pin, nguồn điện
Nhóm các nhà nghiên cứu Khoa Năng lượng thuộc Phòng thí nghiệm Quốc gia Lawrence Berkeley (LBNL) và Đại học Massachusetts Amherst đã chế tạo một loại robot lỏng hoạt động liên tục không cần điện. -

Phát triển loại thép không gỉ có thể tiêu diệt virus SARS-CoV-2
Các nhà nghiên cứu tại Hồng Kông đã nghiên cứu phát triển một loại thép không gỉ có khả năng tiêu tiệt SARS-CoV-2 trong vài giờ giúp hạn chế sự lây lan virus ở các khu vực công cộng, thang máy, tay nắm cửa,… -

Nhật Bản phát minh loại khẩu trang phát hiện được Covid-19
Nhóm các nhà khoa học đến từ Đại học tỉnh Kyoto (KPU), nằm ở phía tây Nhật Bản đã nghiên cứu phát minh ra một loại khẩu trang không những ngăn ngừa lây nhiễm Covid-19 mà còn có khả năng phát hiện nếu tiếp xúc với SARS-CoV-2 -

Sáng chế loại kẹo cao su giúp giảm lây nhiễm Covid-19
Mới đây, các nhà khoa học Mỹ đã sáng chế một loại kẹo cao su mới có khả năng giúp bẫy virus SARS-CoV-2, từ đó giảm các ca lây nhiễm Covid-19. -

Mũ cách ly di động phòng chống dịch Covid-19 lợi hại như thế nào?
"Mũ cách ly" di động Vihelm của 3 bạn trẻ Việt Nam được Tổ chức Sở hữu trí tuệ Thế giới vinh danh, trao danh hiệu Đại sứ trẻ Sở hữu trí tuệ. Vậy sáng chế “chiếc mũ cách ly di động” này có điểm gì đặc biệt trong việc phòng chống dịch Covid-19 hiện nay? -

Trung Quốc phát triển robot tí hon chở thuốc đến tiêu diệt tế bào ung thư
Nghiên cứu mới đăng trên tạp chí ACS Nano cho biết, các nhà khoa học Trung Quốc phát triển robot động vật in 3D có thể di chuyển trong mạch máu, mang theo hạt nano thuốc và tự động phun ra khi đến đích. -

Nghiên cứu phát triển biến bã cà phê thành vật liệu dùng trong pin Lithium-ion
Bã cà phê không chỉ sử dụng để chăm sóc da, làm đẹp, khử mùi ẩm mốc, phân bón,…mà các nhà nghiên cứu tại Indonesia đã phát triển phương pháp biến bã cà phê thành vật liệu dùng trong pin Lithium-ion.